 |
|
|
|
|
On Removing Extrinsic Degeneracies in
Computational Geometry
Introduction
Algorithms
in computational geometry are usually designed for the real RAM (random
access machine) assuming that the input is in general position. The
general position assumption implies that the input to an algorithm for
solving a specific problem is free of certain degeneracies. There
are two kinds of degeneracies:
- Intrinsic
(problem-induced). for example, in computing the convex hull,
three collinear points is problem-induced degeneracy.
- Extrinsic
(algorithm-induced). for certain vertical line-sweep algorithms,
two points with the same x-coordinates constitute an algorithm-induced
degeneracy.
Existing
methods for removing degeneracies in computational geometry can be
classified as either:
The above methods
give the implementer two rather unsatisfactory choices: find an approximation of the original problem given, or find an exact solution to an approximation of the original
problem. Sometime it may be possible to convert the approximate solution
obtained from perturbation methods to the exact solution by using some
kind of post-processing
step, but this step may be difficult and complicated.
Gomez, Ramaswami and Toussaint[ 1] give an
alternative approach for removing extrinsic degeneracies:
- Some
Extrinsic degeneracies can in fact be removed by a global rigid
transformation. Once the solution is obtained on the transformed
non-degenerate input, it can be transformed back trivially to yield the
solution to the original problem.
We will
consider several non-degeneracy assumptions that are typically made in
the literature:
- no two points(2D) in
the plane have the same x-coordinate;
- no two points(3D) in
space lie on a vertical line;
- no two points in space
have the same x-coordinate;
And for each case we will consider the decision problem, computation problem, and optimization problem.
Definitions
- Regular
projection:
- A
projection of point set S (n
points) on a line L is said to be regular if each point in S
projects to a distinct point on L. In other words the project contains n distinct points.
- Let S be a
set of n distinct points in Euclidean space and Let H be a plane, a
projection of S on H is said to be regular
if each point in S projects to a distinct point on H.
- Maximum
projective tolerance:
- The
projection that allows the greatest angular deviation of the viewpoint
without violating the regularity of the projection, i.e,. without
creating degeneracies. We call this regular projection with maximum projective
tolerance.
Degeneracy 1: no two points
in the plane have the same x-coordinate
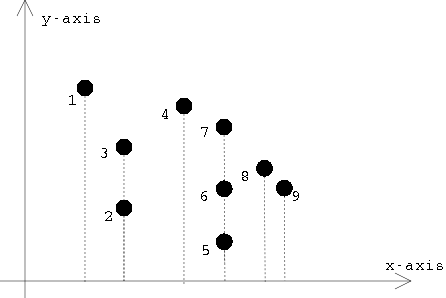
Figure 1: A non-regular
projection of points(2D) on the x-axis.
The Decision Problem
A very simple algorithm suffices since we simply need to check for
duplicates in the x-coordinate values of the point set S. this can be
done in O( n log n) time by sorting these values. The
projection is regular if and only if there are no duplicates. The lower
bound can be established by a reduction from the element-uniqueness problem.
Theorem
1.1: Given a set of S of n
distinct points in the plane and a line L, whether S admits a regular
onto L can be determined in O(n log n) time.
The Computation problem
Given a set S of n distinct points in the plane, find a rotation of S
that removes the degeneracies, or equivalently, a line L such that S
yields a regular projection on L. A regular projection always existed
because the only forbidden directions of projections are those
determined by the lines through pairs of points of S, see Figure 2.
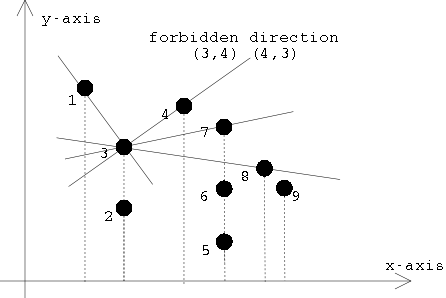
Figure
2: construct the forbidden directions by connecting each pair of points
in S
Let the circle C 2,
representing the set of forbidden directions, be the unit circle in the
plane, centered at the origin. For every pair of points in S, translate
the line through them so that it intersects the origin. Intersect each
such line with C 2 to yield a pair of forbidden points on C 2.
Altogether there are O( n2)
such forbidden points. see Figure 3.
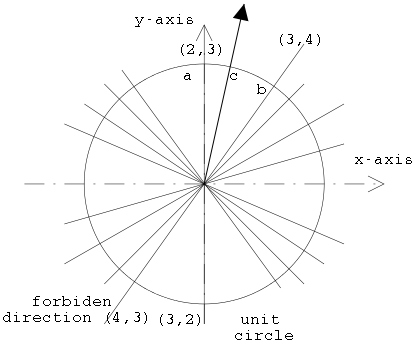
Figure 3: construct the
forbidden points on unit circle.
We may determine a
direction for a regular projection by finding a point in the interior of
any arc of C 2 that is bounded by two distinct adjacent
forbidden points. Such a point on C 2 may be found easily in O( n2 log n) time by using the brute-force approach of sorting the
forbidden points.
A quicker approach is generate a random direction points on C 2,
check if it is conflict with the existing forbidden points, if not, we
get the desired rotation scheme. if it does conflict with the existing
forbidden points, we regenerate another random points, and continue to
check it. The total excepted run time should be O( n2).
Actually we can get this by O( n
log n) time. See Figure 3, let 'a'to
be the points with largest slope which lies on y-axis, if we can find
the second largest slope (say 'b'),
then we can choose any point (say 'c')
in the arc between 'a' and 'b'. rotate the y-axis to align with
'c', we can get the regular
projection. how could we find the second largest slope? there is
a trick, in fact we don't really compute and find the second largest slope which will
take O( n2) time, we
just find its upper bound.
this is can be done as follows:
- Find the largest and smallest y-coordinate of
the points in S, we get maxS(delta(y))
= ymax - ymin.
--- O(n) time.
- Sort the x-coordinates of the points in S, and
discard the duplicates, find the smallest the gap minS'(delta(x)). --- O(n log n) time.
- Compute the upper bound for the Second largest
slope:
maxS(delta(y)) / minS'(delta(x))
Where S' is the distinct projection points of S on x-axis. We can
easily see this value is not less than the second largest slope. see Figure 4.
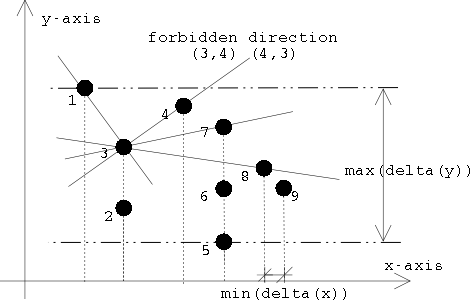
Figure 4: Computing abound on
the second largest distinct slope.
Proof:
- we know the second largest slope = maxS(delta(y)/delta(x)), when delta(x) != 0.
- and it is easily to see: maxS(delta(y)/delta(x)) <= maxS(delta(y))
/ minS'(delta(x)).
Theorem
1.2: Given a set of S of n
distinct points in the plane, finding a regular projection takes O(n log n) time.
The Optimization Problem
We consider now the question of not merely removing the degeneracies
(finding a regular projection), but removing them in the best way
possible, say with maximum projective
tolerance.
See Figure 3, we know this question is
determined by the mid-point of
the largest gap among
consecutive forbidden points on C 2, the circle of
directions. The largest gap can be found by sorting the O( n2) forbidden points.
Theorem
1.3: Given a set of S of n
distinct points in the plane, a regular projection with the maximum
projective tolerance can be computed in O(n2logn) time and O(n2) space.
Degeneracy
2: no two points in space lie
on a vertical line
The Decision Problem
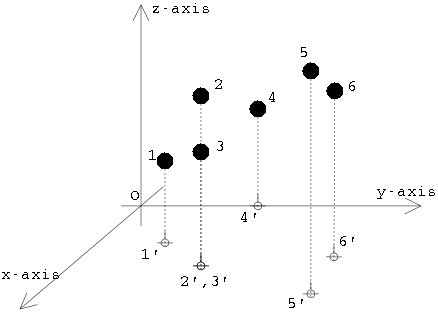
Figure 5: A non-regular
projection of points(3D) on the xy-plane.
Let S be a set of n
distinct points in Euclidean space and Let H be the xy-plane, no
two points in space lie on a vertical line if each point in S projects
to distinct point on H. See Figure 5:
point 2, 3 have same project point on xy-plane. so it isn't a regular
projection.
Let S xy denote the set of points obtained by projecting S
onto the H (xy-plane). First, sort the points in S xy lexicographically
by x and y coordinates. Scan through the sorted list to determine
whether two (or more) points in S xy have the same x and y
coordinates, we can tell whether there are vertical line degeneracies.
which takes O( n log n) time.
Theorem
2.1: Given a set of S of n
distinct points in space and a plane H, determining whether S admits a
regular projection onto H takes O(n log n).
The Computation problem
As in the 2D case, the
only forbidden directions of projections are given by line in space
going through pairs of points in S, because S does not admit a regular
projection onto planes perpendicular to these lines. By translating
every such line to origin and intersecting it with the sphere of
directions, we obtain O(n2)
(not necessarily distinct) forbidden points on C3.
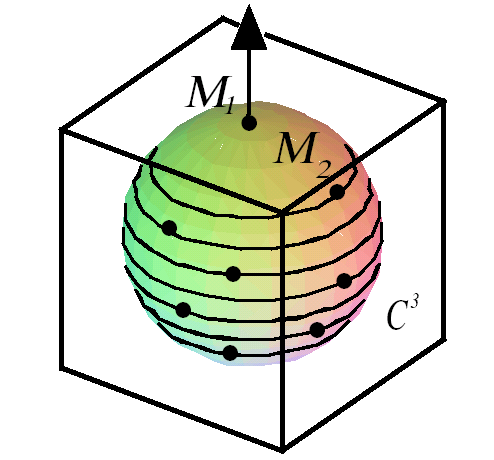
Figure 6: forbidden points on
unit sphere and its latitude circle.
if S doesn't project
regularly onto the xy-plane, then there is at least one forbidden point
at the "north-pole" of the
sphere, say it is M 1, Let M 2 denote
the second largest slope point, we know any sphere point in the latitude circle of M 2
except M 1 can yield a regular projection. See Figure 6.
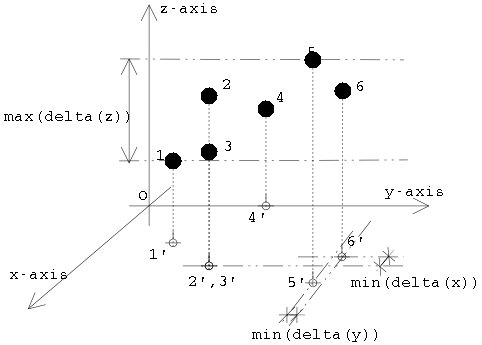
Figure 7: Fast algorithm for
upper bound of the second largest slope.
As in 2D case, we will compute the upper
bound of the second largest slope, instead of the second
largest slope. the algorithm follows:
- Let Sxy, Sx and Sy denote
the sets of points obtained by projecting S onto the xy-plane, x-axis
and y-axis, respectively.
- Sort each of Sxy, Sx and Sy lexicographically. --- O(n log n) time.
- Scan through each sorted list to remove
multiple occurrences of a point ( keeping one copy). Call these new
sorted lists Sxy*, Sx* and Sy*,
respectively.
- Compute the width of S in the
z-direction. maxS{delta(z)}. Also compute d = min{minSx*{delta(x)},
minSy*{delta(y)}}.
- The upper
bound of the second largest slope M2 is maxS{delta(z)}
/ d.
Proof:
- The second
largest slope = maxS(delta(z)/sqrt(delta(x)*delta(x)
+ delta(y)*delta(y))), when delta(x)*delta(x) + delta(y)*delta(y)
!= 0.
- and it is easily to see: maxS(delta(z)/sqrt(delta(x)*delta(x) +
delta(y)*delta(y))) <= maxS{delta(z)} / d.
Theorem
2.2: Given a set of S of n
distinct points in space, finding a regular projection of S takes O(n
log n) time.
The Optimization
Problem
As in the 2D case, it
is desirable to remove vertical-line degeneracies in an optimal way,
i.e., a direction of projection from which we can deviate the most
without introducing degeneracies.
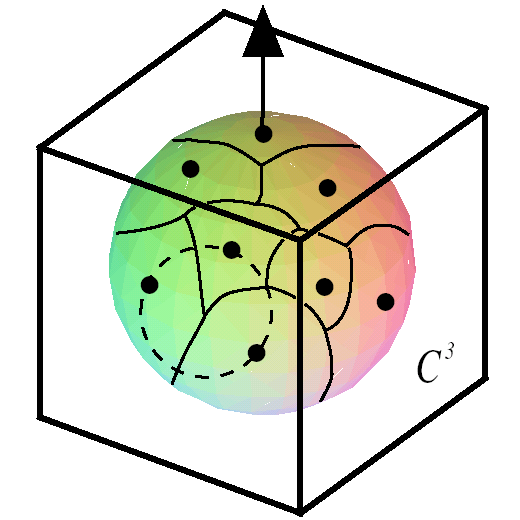
Figure 8: The largest empty
circle on the surface of the direction sphere.
It is easily to see
that such a direction should be determined by the center of the largest empty circle among the m = O( n2)
forbidden points on C 3, See Figure
8.
- Find and discard all duplicate points on C3
by performing a lexicographic sort of the
forbidden points. --- O(m
log m)
- Computing the convex hull of the points.
--- O(m log m)
- Computing The Voronoi diagram on the sphere
from the convex hull in linearly time. --- O(m). The lower convex hull when
projected to the plane is the Delaunay triangulation which is the dual
of the Voronoi diagram and can be computed trivially from it. See
Brown[3] for detail.
- get the largest empty circle. O(m).
- the optimal direction is determined by the
center of the empty largest circle.
Theorem
2.3: Given a set of S of n
distinct points in space, a regular projection plane with the maximum
projective tolerance can be computed in O(n2 log n) time and O(n2) space.
Degeneracy
3: no two points in space have
the same x-coordinates
The Decision Problem
By sorting the points
of S by their x-coordinate value, we can determine if any two points of
S have the same x-coordinate, i.e., if the projection onto the x-axis is
regular or not. Once again, we reduce element-uniqueness to this
problem to show an Omega( n log n) lower bound.
Theorem
3.1: Given a set of S of n
distinct points in space, whether S admits a regular projection onto
the x-axis can be determined in O(n log n) time.
The Computation problem
The problem is find a line L that S yields a regular projection onto L.
This can be done as follows:
- First find a plane of regular projection for
S. Let H be such a plane and let SH be the planar set of
points obtained by projecting S onto H. --- O(n log n) time, Theorem 2.2.
- In the plane H, find a line of regular
projection for SH. Let L be such a line. Since there are no
duplicates in SH, L is also a line of regular projection for
S. --- O(n log n) time, Theorem
1.2.
- Finally, we can translate and rotate the line L
so that it coincides with the x-axis. See Figure 9.
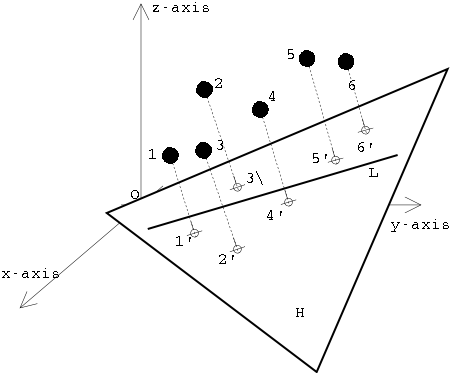
Figure 9: two steps to find a
regular projection.
This result also can be generalized so that no two points have the same
coordinate for two or all three coordinates axes can be computed in O( n log n) time. See Gomez[ 1]
for detail.
The Optimization
Problem
See Figure 10, we see for any line, say L', which
lies on the plane H perpendicular to the line ab, points a and b will have the same projection
points on L'.
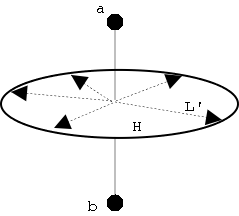
Figure 10: Any projection
line lie on the plane H perpendicular to ab will introduce degeneracy.
Therefore a pair of
points in S yields a great circle on the sphere C 3
as the set of forbidden directions for the desired x-axis. Thus the
entire set S yields an arrangement of O( n2)
great circles on C 3, See Figure 11.
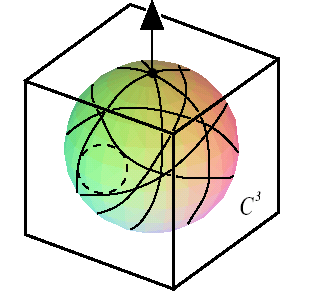
Figure 11: The largest circle
contained in a face of the arrangement.
To find a projection
of maximum projective tolerance, we need to find a point on the sphere C 3
which is the center of the largest spherical disc contained in a face of
the arrangement of great circles.
There are O( n2)
great circles with a total of O( n4)
intersections in the arrangement. Compute the entire arrangement and
the largest spherical disc contained in each face, which takes time
linear in the size of the face. It follows a line L in space such that S
yields the regular projection onto L with the maximum projective
tolerance can be found in O( n4)
time and space.
However,
this problem could be solved by a different way:
- As in the Degeneracy 2 case, we compute
the forbidden points on the sphere C3 for each pairs points in
S. Let Sf denote the forbidden points set.
- We can prove that finding the largest
circle contained in the face of the arrangement (See Figure 11) is equivalent to computing the smallest enclosing cylinder
containing Sf. For the proof, see
Gomez[1],
- Computing the smallest enclosing cylinder
containing Sf.
--- O(n3+e),
for any e > 0. Pankakj[2].
- The axes of the smallest enclosing cylinder is the direction with maximum projective
tolerance.
Theorem
3.3: Given a set of S of n
distinct points in space, a line L in space such that S yields a
regular projective onto L with the maximum projective tolerance can be
found in O(n3+e) time and space, for any e > 0.
Applet
Implemented Features:
|
Decision |
Computation |
Optimization |
Degeneracy 1
|
yes
|
yes
|
yes
|
| Degeneracy 1 |
yes
|
yes
|
yes
|
| Degeneracy 1 |
yes
|
yes
|
no
|
Usages:
- Click the check-box on the above panel to choose the type of
degeneracy you want to play with.
- In the text-field,
fill the number of points you want to generate by random methods,
The number should be in the range of [4,40].
- Click the [Random
Points] to generate point set, the points generated by random
methods alway have degeneracy for the purpose of demonstration.
- You can use the [Add Point], [Remove Point] to manipulate the
point set.
- You can hold down any mouse button, and drag
the mouse in the display region to rotate
the view. The lfet region display the point set, and the
right region display the the forbidden direction points on unit circle
or on unit sphere.
- Check the check-box
on the bottom panel, to see the
projected points.
- Click [Decision]button
to tell whether the given point set is regular.
- Click [Compute]button
to compute the regular projection direction as fast as possible if the
the given point set is not regular. after that, the [execute] button is enabled,
you can click it to rotate the point set to get regular projection.
- Click [Optimize]button
to compute the optimal regular projection direction. after that, the [execute] button is enabled,
you can click it to rotate the point set to get optimal regular
projection.
Keywords
- General Position: The general position assumption
implies that the input to an algorithm for solving a specific problem
is free of certain degeneracies.
- Lexicographical Sort: Compare two points first by its
x-coordinate, if they is equal, then compare their y-coordinate, an so
on z-coordinate. sort by this way, we mean we do lexicographical sort.
- Great circle: The plane of great circle passes the
center of the sphere.
References & Links
- Francisco Gomez, Suneeta Ramaswami and Godfried T. Toussaint, "On removing non-degeneracy assumptions in
computational geometry," Proceedings of the Italian Conference
on Algorithms, March 12-14, 1997, Rome, Italy, pp. 52-63.
- Pankaj
K. Agarwal, Boris Aronov, Micha Sharir, "Line Transversals
of Balls and Smallest Enclosing Cylinders in Three Dimensions", May
14, 1997.
- K. Q. Brown. "Geometric transforms for fast geometric
algorithms". Ph.D. thesis, Department of Computer Science,
Carnegie-Mellon University, Pittsbugh, PA, 1980. Report CMU-CS-80-101.
- J. O'Rourke
(1998). Computational Geometry in C (2nd ed.)
Thanks
- Prof.
Godfried T. Toussaint is one of the best professors I have met in my
life, he taught us a lot very insightful and interesting things. I
benefit from him a lot.
- This web
page style is "borrowed" from the "3-Coins
Algorithm Tutorial (Greg Aloupis and Bohdan Kaluzny)".
Thanks to Greg
Aloupis and Bohdan Kaluzny.
|
|
|
|
|
|
|

