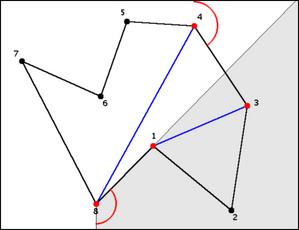
Find a righmost reflex joint;
In this example, it's point 1, shown in red.
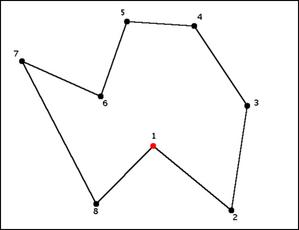
Relabel the joints counterclockwise along the polygon's perimeter so that this rightmost reflex joint is j1, and all straight joints are ignored.
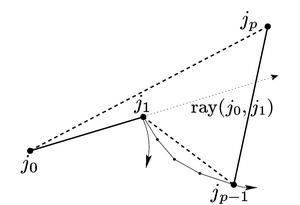
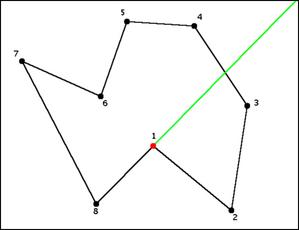
Find the index p such that jp is the
first joint not on the right of the ray
( j0, 1 )
In this case, it is the joint 4.
Perform the move described below until either the joints
j0,j1, and jp-1 become colinear,
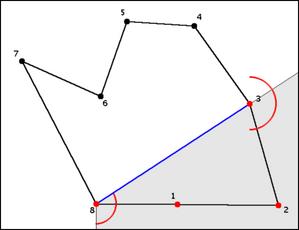
or one of the moving joints straightens. In this instance, we rotate point
1 counterclockwise about point 8, maintaining the lengths of all the links.
Only the angles at four points are allowed to change: joints 8, 1, 3 and 4.
If the joints j0, j1, and jp-1 become colinear first, decrement p and continue the move with the new jp and jp-1.
In the example, the joints 8, 1 and 3 become colinear. So joint 3 becomes the new jp.
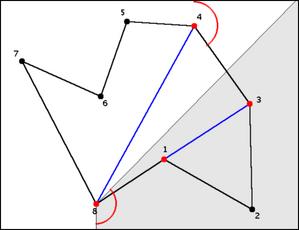
If a joint straightens, the iteration is complete, go on to find the new righmost reflex joint.
In the example shown here, this will happen after we update p and continue the move: the joint 1 straightens. Now one reflex vertex has been straightened.