| |
What's given |
What we want |
| Formally: |
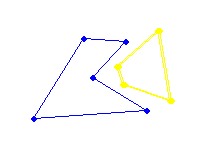
A polygons P with n vertices
A polygon Q with m vertices
Both simple and disjoint |
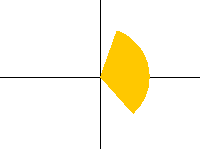
The movability wedge of P w.r.t. Q
i.e. all directions in which P can be
taken arbitrarily far from Q in one shot |
| Example: |
 |
 |
The most obvious application is in the grasping problem in robotics.
Consider Q as a 2D robot hand and P as an object:


|


|
The wedge is NOT empty i.e.
the hand is NOT grasping the object |
The wedge is empty i.e.
the hand IS grasping the object |