Theorem 2: Any planar convex polygon P can be reconfigured into any other planar convex polygon P' using pivots.
Proof: Locate a quadrangle V1V2 V3 V 4 where the vertices are labelled -, +, -, +, respectively, in P. Then, step through the following motions:
- Pivot on V1V3, rotating the entire subpolygon until V2 is over V1V3.
- Pivot on V2V4 to bring the quadrangle into a planar configuration.
- Pivot on V4V1 to bring the subpolygon defined by those two vertices into the plane of the quadrangle.
- Pivot on the remaining three edges to bring each of their subpolygons
into the plane of the quadrangle..
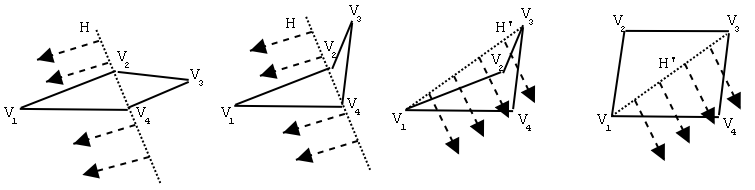
Lemma 4: Let V1 V 2V3V4 be a planar convex quadrangle. After two pivots, suppose the quadrangle is again planar, resulting in a quadrangle, V1V2 V3V4 . Then
< V2V1 V4 will be at least the original value of the expression | <V2 V 1 V3 - < V4 V1 V 3 |.
Proof: If both pivots are on the diagonal V2V 4, then the angle at V 1 has not changed, and so we must only consider the remaining cases, where the first (or both) pivot is on V1V3, and where the first pivot is on V 2V4 and the second is on V 1 V 3 .
In the former case, the pivot must occur on a planar quadrangle, with the vertex of the quadrangle on the moving subpolygon--say it is V 2-- tracing a circle around V1V 3 as it rotates, and thus the angle V2V1 V 3 remains constant throughout the pivot. Since V 4 remains fixed during the motion, the angle V4 V 1 V3 also remains constant, and so the angle after the pivot must be at least the difference |< V 2 V 1V 3 - < V 4 V 1 V 3|.
In the latter case, the two pivots must bring the quadrangle into a planar configuration, and the distance V2V 4 is increasing during the motion, so by the law of sines, < V2V1V4 must also have increased, and so is greater than |<V2V1 V 3 - < V4V1V3 |.
This leads to the main theorem for this part:
Theorem 3: There exist polygons which require arbitrarily many pivots to achieve a goal configuration.
Proof: Consider
the case of a pair of pivots that result in a planar non-intersecting
quadrangle after the motions depicted in the figure below. The parallelogram
has the property that <V1 can be made arbitrarily close
to zero, and since it is not a rhombus,

Also, since for small angles <x, sin x ~ x, and so as <V1 decreases, for every two pivots <V 1 is only reduced to an angle <V1' where